Searching for MH370 – September 1, 2016
Searching for Malaysia Airlines Flight 370
UPDATE 2017: On January 17, 2017 the tripartite Ministers of Australia, Malaysia and China announced that the underwater search for MH370 was suspended.
UPDATE: Upon further review, the pingers that were found in April are not thought to be from flight MH370. The search for Flight MH370 will continue using multibeam sonar and side scan sonar.
On March 8, 2014, a Malaysian Airlines Boeing 777, flight MH370, disappeared while en route from Kuala Lumpur, Malaysia, to Beijing, China. Officials now believe the plane may have crashed somewhere over the southern Indian Ocean.
In early April, several ships searching for the missing jetliner detected acoustic pulses that might correspond with “pings” from locator beacons on the aircraft’s black box transmitters. The pulses had a frequency close to 37.5 kHz, consistent with that of aircraft black boxes. The ships were using sophisticated hydrophones to detect such signals. Officials working to verify and locate the source of these underwater pings were battling a time limitation, as battery life for the emergency locator beacons was assumed to be running low (the batteries last 30 days).
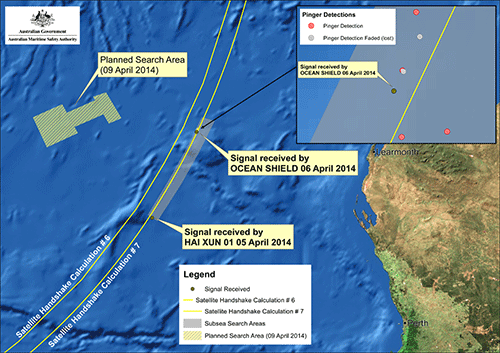
Location map showing where the pings from the black boxes where heard. The land mass on the right side of the image is the west coast of Australia. The seafloor search is centered on the pinger detection locations. Image copyright Australian Maritime Safety Authority.
The pinger locater, which can pick up signals up to a depth of 6,100 m [20,000 feet] must be within range of the black boxes in order to detect them, a difficult task given the large size of the search area and the fact that the hydrophone must be dragged slowly through the water. The ocean is also a noisy place, and detecting continued signals could be difficult. During a recent CNN interview, Dr. James Miller, professor of Ocean Engineering with the University of Rhode Island, explained the challenges associated with detecting underwater sounds, such as acoustic pulses associated with black box transmitters. Watch the video at this link: https://www.cnn.com/videos/world/2014/04/07/erin-pkg-flores-search-for-pings-mh370.cnn.
After detecting the pinger signal, the search task force switched to looking for the plane on the bottom of the ocean in the vicinity of the pings. On April 15, 2015, a U.S. Navy autonomous underwater vehicle (AUV) was deployed to aid in the search for missing plane. Using sidescan sonar, the AUV slowly scans the seafloor, building a detailed acoustic image of the area. Sonar is often used to find objects on the bottom of the ocean. With sidescan sonar, pulsed signals are transmitted from each side of the vehicle and reflected back from the bottom and other objects on the seafloor. Hard materials, like rocks, will scatter more sound while soft materials, like mud, will absorb more sound. Different amounts of scattering produces different amounts of acoustic return, and thus, will produce a different image of the seafloor. Side scan sonar is very sensitive and can measure features on the ocean bottom smaller than 1 centimeter (less than 1/2 an inch). Typical uses of side scan sonar include: looking for objects on the seafloor (sunken ships, pipelines, downed aircraft, lost cargo), detailed mapping of the seafloor, and looking at special features on the seafloor like underwater volcanoes.
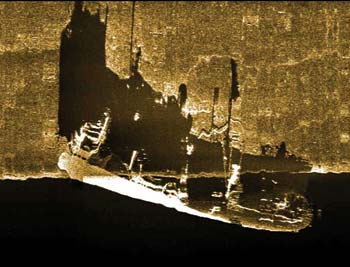
The shipwreck of the Empire Knight. Photo courtesy of Klein Associates, www.kleinsonar.com.
Other deep-sea vessels, including deep-water towed sonar devices, may be deployed in the future to continue the search for the missing plane. The search for MH370 is the longest and most expensive in aviation history.
Additional Links on DOSITS:
- How is sound used to map the seafloor?
- How is sound used to find objects on the ocean bottom?
- Side Scan Sonar
- Multibeam Echosounder
- Sonar
Additional Resources
- Hear noises that hinder black box search – CNN Video – https://www.cnn.com/videos/world/2014/04/07/erin-pkg-flores-search-for-pings-mh370.cnn