Underwater GPS
The global positioning system (GPS) is commonly used on land and in the air to obtain position and timing information. However, the radio frequencies used by GPS cannot penetrate in seawater, requiring a different system for underwater positioning. This information is useful to a variety of ships, automated vehicles, and even individuals.
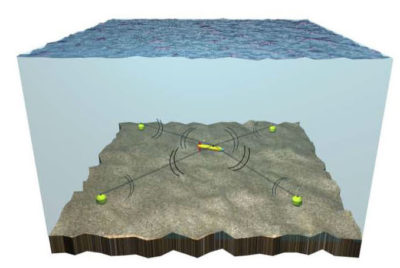
A long baseline system with an underwater vehicle transmitting and receiving from four baseline stations at the corners of the positioning system. Figure
used with permission (Alcocer, Oliveira, and Pascoal, 2006).
One solution is to measure positions relative to a framework of baseline stations. Long baseline (LBL), short baseline (SBL), and ultra-short baseline (USBL) systems are classic underwater positioning systems. In a long baseline system, baseline stations are placed on the seafloor and their locations are measured precisely. The underwater target, such as an autonomous underwater vehicle (AUV), remotely operated vehicle (ROV), or a diver, transmits an acoustic signal that is received by the baseline stations. The baseline stations send an acoustic signal back to the underwater target, which records the response. Times of arrival of the signals from the baseline stations are used to estimate the location of the underwater target. The Positioning System for Deep Ocean Navigation (POSYDON) program is working to extend the concept of long baseline systems to allow positioning across ocean basins. An undersea target would use signals transmitted by a small number of long-range acoustic sources to obtain continuous, accurate positioning without surfacing.
Short baseline systems and ultra-short baseline systems are frequently mounted on vessels. Short baseline systems have three or more sonar transducers connected by a wire to a central control box. Ultra-short baseline systems have three or more sonar transducers mounted on a rigid pole. The underwater target transmits an acoustic signal that is received by the sonar transducers. Times of arrival of the signals from the underwater target are used to estimate its location.
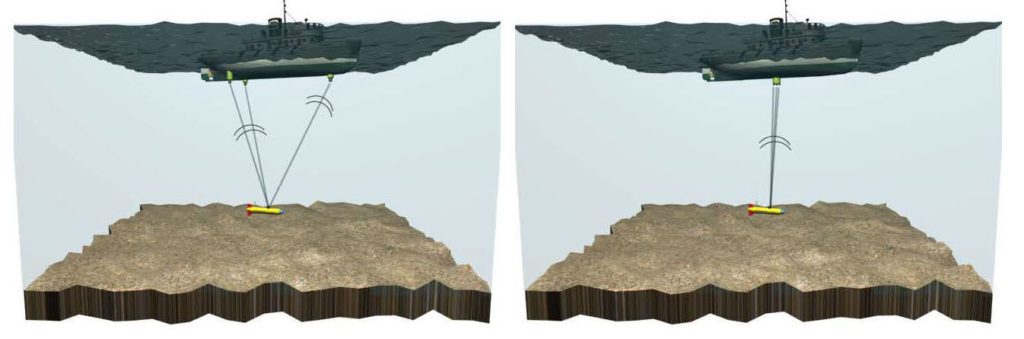
(Left) A short baseline system and (right) an ultra-short baseline system with an underwater vehicle transmitting to sonar transducers. Figure used with permission (Alcocer, Oliveira, and Pascoal, 2006)
GPS Intelligent Buoys (GIBs) are a portable tracking system that includes a network of surface buoys equipped with GPS receivers and submerged hydrophones. Each hydrophone receives acoustic signals transmitted by a synchronized pinger onbard an underwater target. The buoys communicate the times of arrival of the received signals to a central station, such as a local support vessel, where the position of the underwater target is estimated.
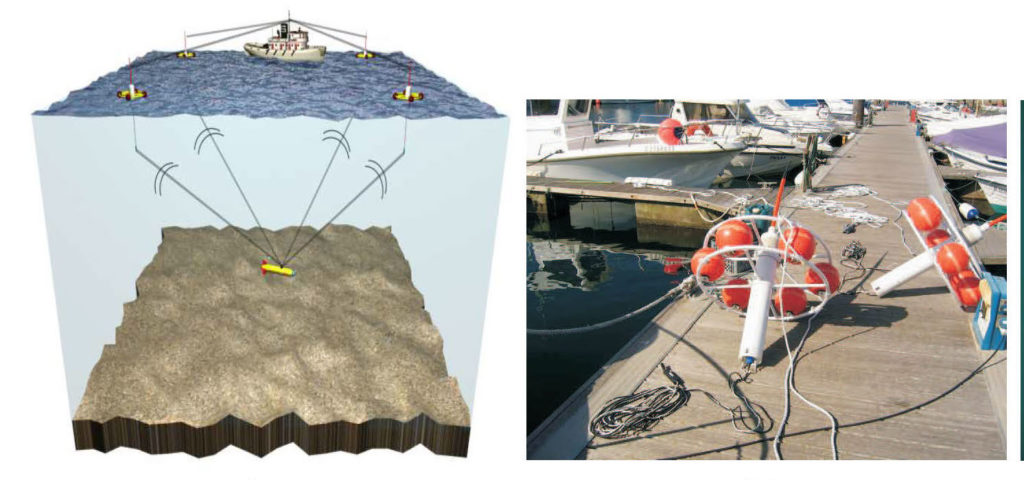
(Left) Four GPS intelligent buoys receive signals from an underwater vehicle and transmit the information to a local support vessel. (Right) A GPS intelligent buoy. The hydrophone is deployed at the end of a cable below the white cage containing orange floats and an orange GPS receiver antenna. Figure used with permission (Alcocer, Oliveira, and Pascoal, 2006).
Additional Links on DOSITS
- Technology Gallery > Hydrophone/Receiver
Additional Resources
- Alcocer, A., Oliveira, P., & Pascoal, A. (2006). Underwater acoustic positioning systems based on buoys with GPS.
- Positioning System for Deep Ocean Navigation (POSYDON) (Archived)