Multibeam Echosounder
History and Usage
Sonar (Sound Navigation And Ranging) is a technology used to detect objects in the water and at and within the seafloor. There are two basic types of sonar – passive and active. Passive sonars listen for underwater sounds. Active sonar systems emit sounds and use returning echoes to detect, locate, and classify objects in the environment. Multibeam echosounders (MBES) are advanced active sonar systems that emit a number of narrow sound waves in a fan shape (swath), using an array of transducers. Multibeam echosounders were first developed by the U.S. Navy in the 1960s [1]. Since then, they have become the standard technology for high-resolution measurements of the seafloor. In contrast to single-beam echosounders, which make a single measurement of the seafloor depth with an acoustic “ping,” multibeam echosounders can make hundreds of bathymetric measurements within a single ping cycle by using a signal processing technique called beamforming (see Multibeam Echosounder Audio Gallery page). In addition to producing high-resolution bathymetry, multibeam systems also collect acoustic backscatter measurements of the seafloor and water column, which provide insight into the composition of the seafloor. They can localize targets in the water column, such as gas seeps or fish schools (Figure 1).
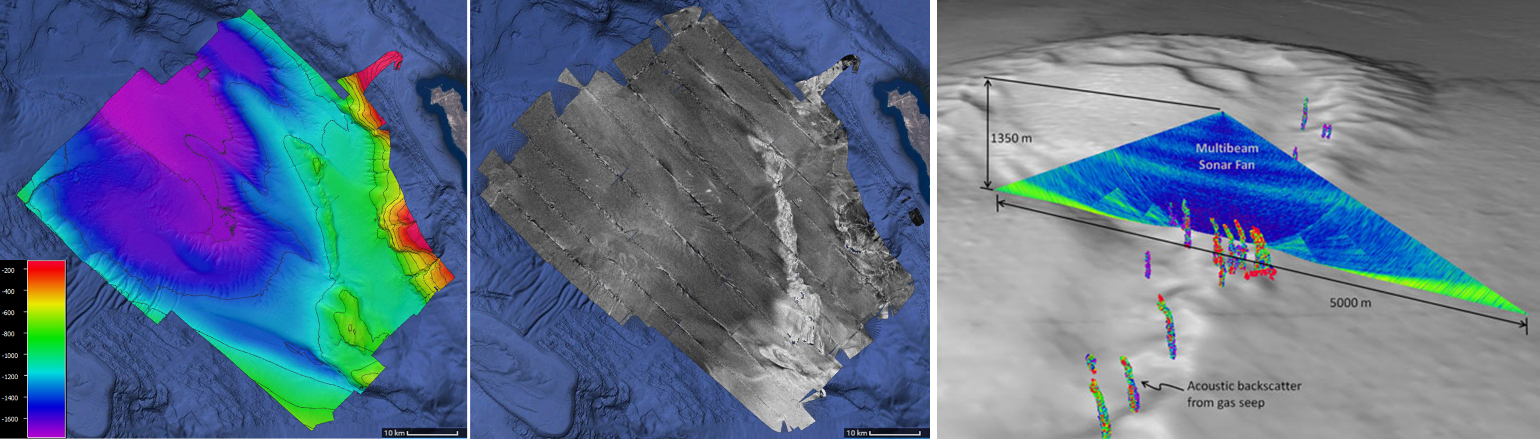
Figure 1: Example data products generated from MBES data. Image credit: M. Smith CCOM/JHC. Left: High resolution bathymetry of a basin off the coast of California, USA. Middle: Acoustic backscatter of the seafloor showing where the bottom geological composition changes. Image credit: M. Smith. Right: Multibeam echosounder water-column data used to identify gas seeps. Image credit: T. Weber [2].
Design and Operation
Multibeam echosounders are able to make accurate seafloor measurements due to their unique arrangement of acoustic transducers, which are controlled by advanced signal processing techniques. Each MBES is composed of hundreds of transducer elements arranged in two distinct arrays. One array, known as the projector, is used to generate the acoustic signal in a fan-shaped pattern (“swath”) that is narrow in the direction of the ship-track and very wide across the ship-track direction. The transmitted sound pulse travels through the water, reflects off the seafloor and is then received at the second array, perpendicular to the projector and referred to as the receiver (Figure 2) [3]. The receiver uses advanced digital signal processing to convert the acoustic recordings from each of the transducers into a series of electronically formed ‘beams.’ The intersection of each receiver beam with the projector’s acoustic swath defines the footprint for one independent sounding, that is one sample of the seafloor bathymetry [3]. This configuration is called a Mills Cross.
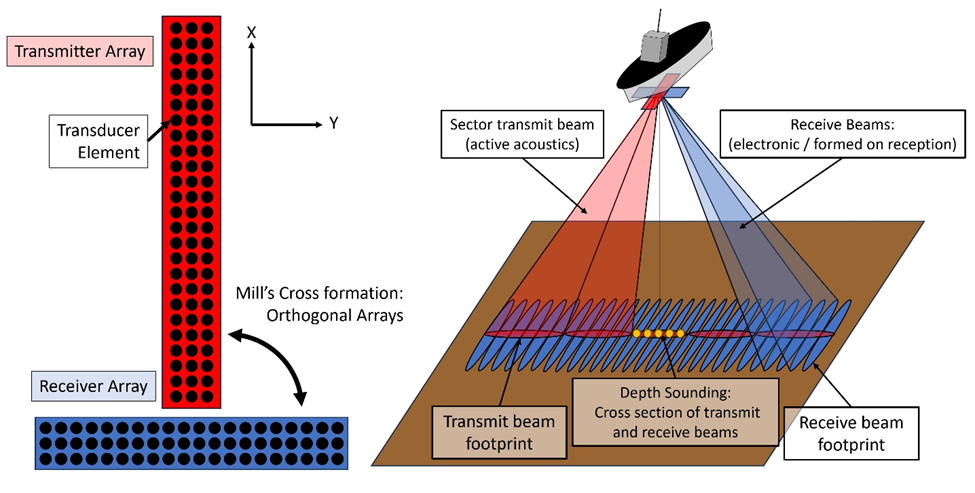
Figure 2: Left: Example of an MBES array design. Red array is the transmit array used for active acoustics. Blue is a receiver array used for electronic beamforming. Each circle represents a transducer element. Right: Multibeam operation fundamentals. The transmit array in red creates a narrow beam or swath of sound (red). The receiver uses digital signal processing to form numerous receive beams (example in blue). The intersection of the red and blue beams gives the final beam area used to derive a single depth sounding (orange circles). Image credit: Mike Smith
Multibeam echosounders can be designed to operate in all ocean depths, depending on their operating frequency. Shallow-water systems, as seen in the left of Figure 3, feature short projector and receiver arrays and operate at very high frequencies (100-1000 kHz); they can be installed on very small ships or underwater vehicles. To make measurements at the greatest depths, deep-water MBES feature much larger arrays and lower frequencies (10-70 kHz) (right Figure 3). They have to be installed on high-sea vessels with large enough hulls for hosting arrays that are several meters long.
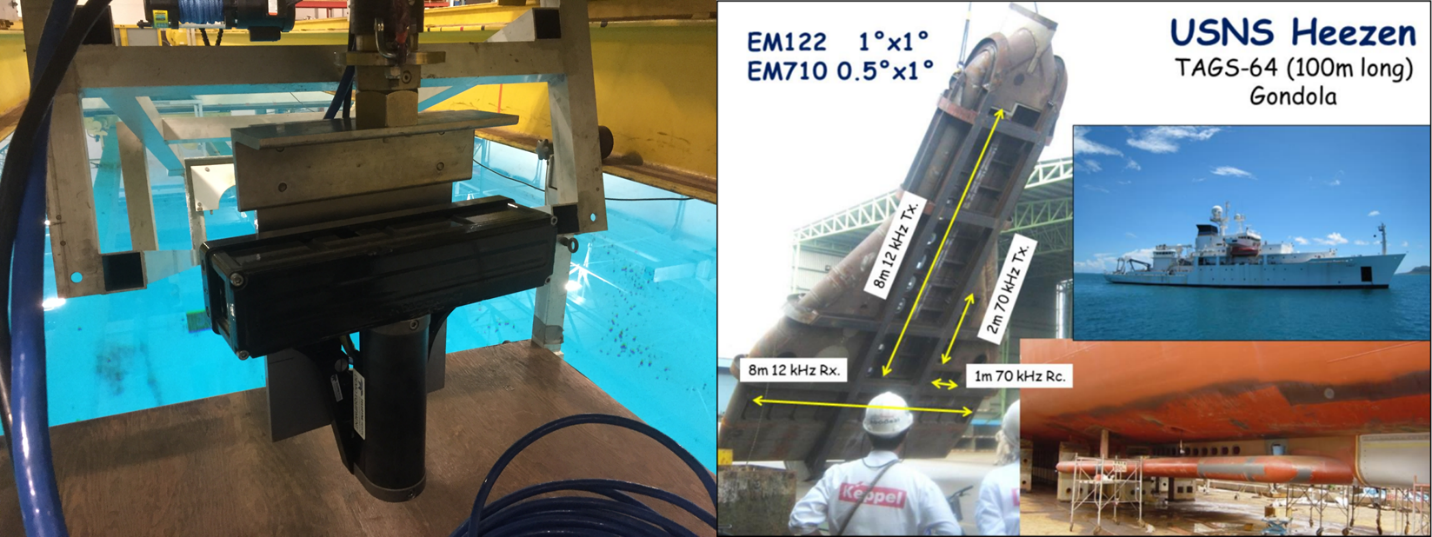
Figure 3: Example MBES systems. Left: A Teledyne Reson Seabat T50-P designed for shallow water operation. Image credit: M. Smith CCOM/JHC. Right: A ship gondola which holds a Kongsberg EM122, a deep water MBES with arrays as long as 8 m. Image credit: J. Hughes Clarke [5].
Multibeam echosounders transmit acoustic pulses that are very different from other acoustic systems (Navy sonar, airguns, etc. – see Effects of Anthropogenic Sounds – Multibeam echosounders). Their pulses have very short durations, ranging from less than one millisecond to as long as 20 milliseconds for the deepest depths. As noted above, the central frequency used in the systems will vary based on the system and survey depth; however, the frequency content in any given signal remains close to the central frequency. The ping rate, or the time between two pings, is also dependent on the depth. In shallow water, many pings may be transmitted within a single second. For deep water, it may be over 12 seconds between pings as the system waits for the pulses to echo off the seafloor.


Figure 4: Left: A multibeam echosounder with a single swath and no motion compensation. Right: A multibeam system that uses multisector technology. Note the transmit swath has been broken into 9 independent sectors. Image Credit: John Hughes Clarke [5]
Figure 5: Animated image of a ping cycle of a hull-mounted MBES with multisector and multiswath functionality. The animation represents two swaths. The red/green represents the first swath with eight sectors and the blue/cyan represents the second swath also with eight sectors. Each grid line represents 500 m. Image Credit: John Hughes Clarke [5].
References
| [1] | M. F. Glenn, “Introducing an operational multi-beam array sonar,” International Hydrographic Review, vol. 47, no. 1, pp. 35-39, 1970. |
| [2] | T. C. Weber, “Gulf of Mexico Expedition 2011,” NOAA Office of Ocean Exploration and Research, 2011. [Online]. Available: https://oceanexplorer.noaa.gov/okeanos/explorations/ex1105/welcome.html. [Accessed 18 08 2023]. |
| [3] | X. Lurton, An Introduction to Underwater Acoustics: Principles and Applications, 2 ed., Springer Praxis Books, 2010. |
| [4] | J. H. Clarke, OE/ESCI 874 Seabed Mapping Class, CCOM/JHC UNH, 2023. |
Related DOSITS Pages
- People and Sound > How is sound used to map the seafloor?