Echosounder
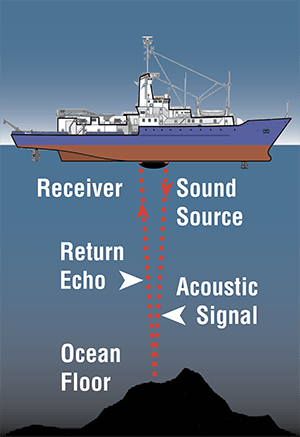
Echosounders calculate water depth by measuring the time it takes for the acoustic signal to reach the bottom and the echo to return to the ship. Image Credit: DOSITS.
The most common system for measuring water depth, and preventing collisions with unseen underwater rocks, reefs, etc., is the echosounder. These sonar systems use a transducer that is usually mounted on the bottom of a ship. Sound pulses are sent from the transducer straight down into the water. The sound reflects off the seafloor and returns to the transducer. The time the sound takes to travel to the bottom and back is used to calculate the distance to the seafloor. Water depth is estimated by using the speed of sound through the water (approximately 1,500 meters per second) and a simple calculation:
The product is divided by two because the measured time is the round-trip time (from the transducer to the seafloor and back to the transducer). The faster the sound pulses return to the transducer from the ocean floor, the shallower the water depth is and the higher the elevation of the sea floor. The sound pulses are sent out regularly as the ship moves along the surface, which produces a line showing the depth of the ocean beneath the ship. This continuous depth data is used to create bathymetry maps of the survey area.
Additional Links on DOSITS
- How is sound used to measure water depth?
- How is sound used to study the Earth’s history?
- How is sound used to map the sea floor?
Additional Resources
- Dive and Discover- Mapping the Ocean Floor with Echo Sounding.
- WHOI Voyage to Punta Ridge – Measuring Water Depth: Echosounding.